主营产品
设计与选型
光纤陀螺仪(FOG)级IMU 爱普生M-G370和M-G365接受样品预定
所谓I
MU,爱普生的标准称谓是惯性测量单元,也可以翻译为惯性测量装置,是用于感应惯性运动的姿态调整设备。它由
三轴角速度传感器和
三轴加速度计组成。早在2011年,爱普生就发布了旗下IMU,可以正确检测出包含从微小的倾斜到大范围动作在内的惯性运动信息。自此,爱普生 IMU便在航空航天以及工业产品中得到了广泛应用,并因杰出的质量和性能而赢得高度赞誉。
随着自主精密农业机械、智能施工机械和无人机应用的快速发展,小型高性价比、高精度定位装置的需求与日俱增,而爱普生新开发的
M-G370和
M-G365凭借出色的表现为自动驾驶和导航提供
光纤陀螺仪
(
FOG)级性能。
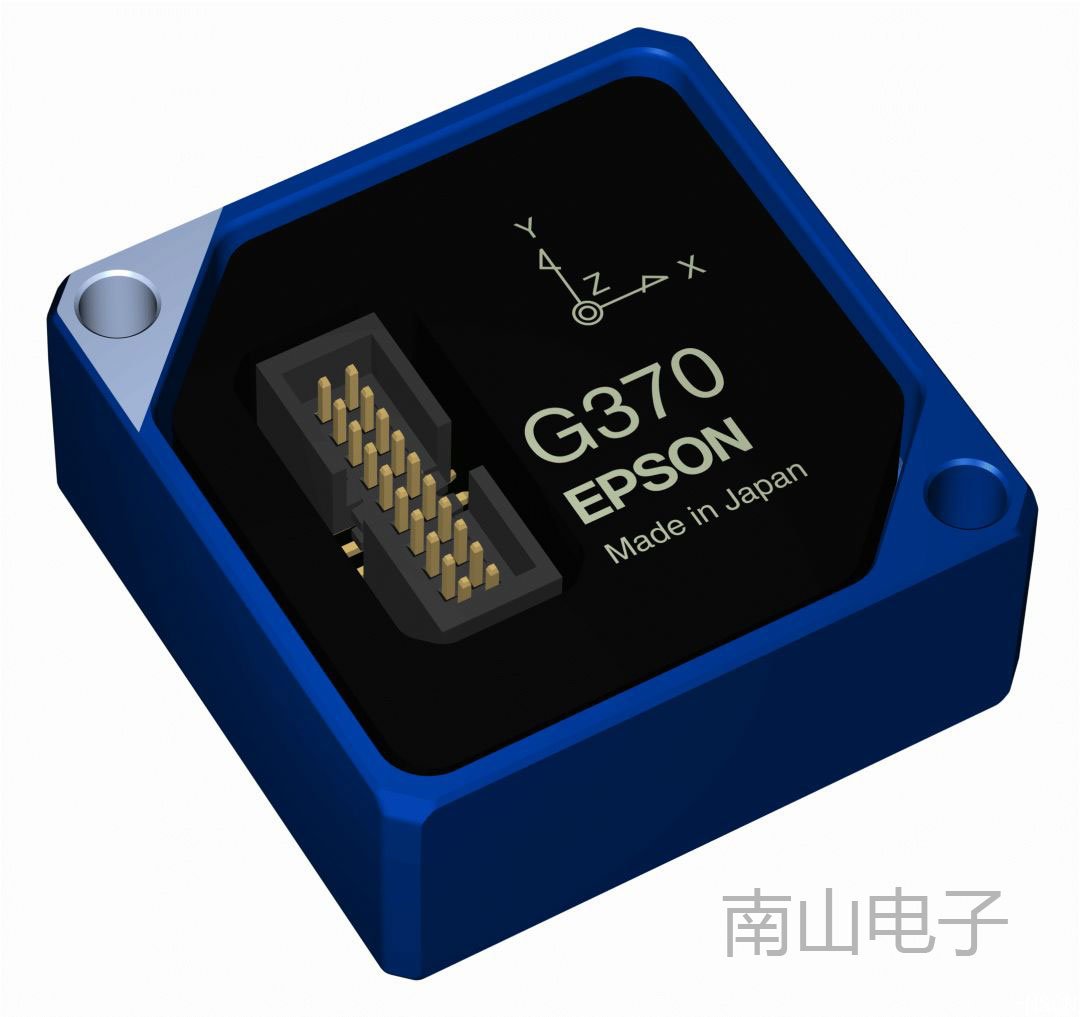
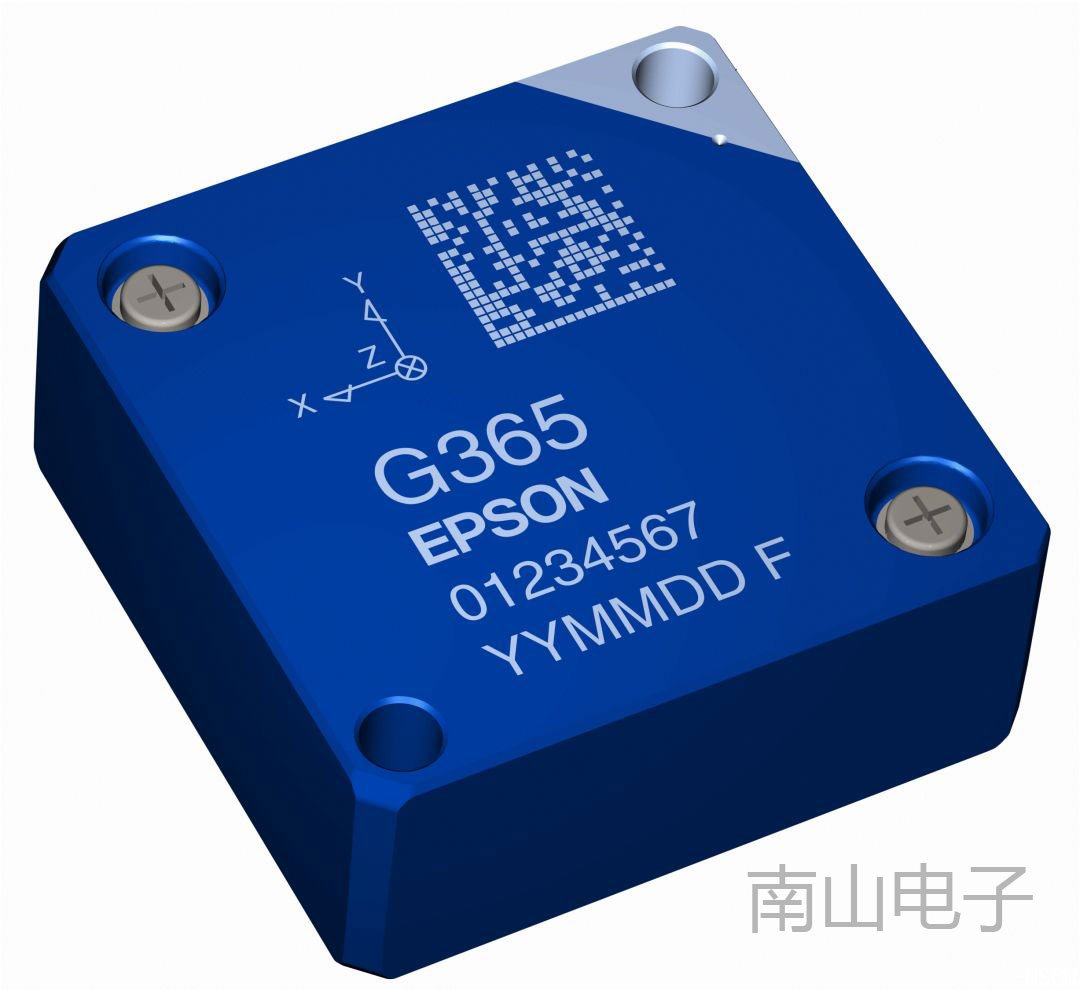
下图为 M-G370和 M-G365 图片
下图为 M-G370和 M-G365 图片
此外,M-G370和M-G365还保持了 与早期型号
M-G364和
M-G354的向后兼容性, 能轻松实现性能升级。
对于具有光纤陀螺仪
(
FOG)级性能的M-G370来说,凭借高精度和高稳定的测试性能,被广泛应用于惯性导航和对位置测量精度要求高的领域,如自主驾驶、无人驾驶等领域。
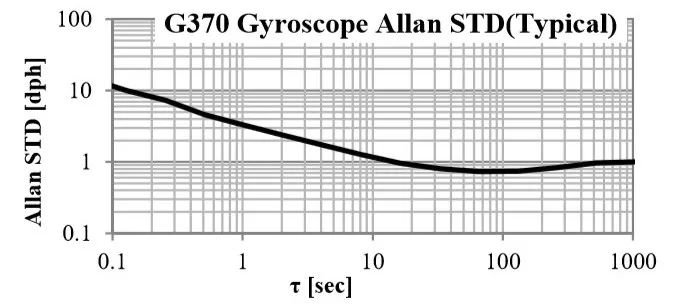
M-G370还搭载了新开发的陀螺传感器(角速度传感器,测量单位时间上某物体关于参考轴的旋转角度(角速度)),极大提高了零偏稳定性*4 (0.8°/小时)、角随机游走*5和噪音性能。并且新开发的加速度计大大提高了零偏稳定性(达到6 uG,而M-G364的零偏稳定性为50 uG),初始零偏误差为2 mg (1σ)。

新一代IMU标准的M-G365,安装简单,具有新的姿态角输出功能并支持各种应用,并且具有扩展卡尔曼滤波器*6的高速DSP*7能以较低功耗提供高精度实时姿态角输出(横滚角/俯仰角/偏航角)*8,可广泛适用于车辆、船只及其他多种工业产品和系统,用来测量数据和控制运动等,而且系统端不再需要动态姿态角的高速计算,从而减小了系统载荷和功耗。
值得一提的是,新型M-G370和M-G365均采用了新开发的高性能传感器,具有稳定性更好、噪音更低、动态范围更广的优越特点。而且动态性能出色(比例因子非线性),非常适合从静态到高速运动的高精度测量。
与此同时,M-G370和M-G365的向后兼容性,更是大大降低了用户开发成本和评价时间,更有较低的电流消耗(16 mA,而M-G364和M-G354为18 mA)。
爱普生M-G370和M-G365产品技术规格

应用实例
● 精密农业和建筑机械的自主驾驶和无人控制。
● 无人设备,如工业无人机、地面车辆和水下设备。
● 导航系统(GNSS*9、INS*10、高精度定位仪)。
● 云台相机和天线稳定系统。
● 工业设备和车辆的振动、角度和路径测量。
六轴陀螺仪模块基本概念:
*1惯性测量装置(IMU)是用于感应惯性运动的设备。它由三轴角速度传感器和三轴加速度计组成。
*2光纤陀螺仪(FOG)是一种在少量高性能IMU中使用的、基于光纤和光干涉特性的陀螺传感器。
*3陀螺传感器(角速度传感器)测量单位时间上某物体关于参考轴的旋转角度(角速度)。
*4零偏稳定性是一个衡量规定取样时间和平均时间间隔上计算的陀螺仪零偏随机变化的指标,该零偏变化用1/f噪声密度表示。
*5角随机游走是一个衡量规定取样时间和平均时间间隔上计算的陀螺仪零偏随机变化的指标,该零偏变化用随机噪声密度表示。
*6扩展卡尔曼滤波器利用模型估值和实际观察值依次计算可能值,以便更准确地预测观察值中的信息,包括滤波器误差。
*7数字信号处理器(DSP)是处理数字信号的高速运算电路。
*8方位角(横滚角、俯仰角和偏航角):
•横滚角:物体沿其纵轴旋转的角度
•俯仰角:物体沿其横轴旋转的角度
•偏航角:物体沿其垂直轴旋转的角度
*9导航卫星系统(GNSS)是一种用于准确指出地球上任意一处地理位置的卫星系统。
*10惯性导航系统(INS)
华体会真人是爱普生IMU等全系列晶振晶体,实时时钟芯片、有源晶振,无源晶振授权代理商。爱普生主力型号M-G370、M-G365、M-G325三款惯性测量单元在通过相关资质备案后均可以快速供货。
- 上一篇:爱普生芯片件斩获TRULY杰出战略伙伴大奖
- 下一篇:如何正确找到爱普生晶振厂家
新闻公告
-
2023-12-20爱普生三轴加速度传感器M-A352AD10
-
2021-04-22爱普生发布全新TCXO温补晶振TG5032
-
2021-04-16爱普生hth登录入口手机端XV7021BB完整数
-
2021-03-19WürthElektronik伍尔特推出温度稳
-
2021-03-17伍尔特IQD推出上超小的LVDS LVPEC
-
2021-03-01爱普生车规级温补晶振TG2016SKA完

 466009906
466009906